![]()
VIP Program at Howard University (VIPatHOWARD)
Howard University
Washington, DC 20059
VIP Coordinator: Dr. Charles Kim (CKIM@HOWARD.EDU), Professor, Electrical Engineering and Computer Science
This program was sponsored by The Leona M. and Harry B. Helmsley Charitable Trust for 3 years from 2015 as part of VIP Consortium Project to drive systemic reform of STEM education. During and after the major sponsorship, additional financial support was generously made by Northrop Grumman Corp.
![]()
![]()
* How to Join?: If you want to join one of the teams below, contact Project Advisor (via email) or the VIP Coordinator (Dr. Charles Kim) via eamil ckim@howard.edu.
Any question can be directed to the VIP coordinator at ckim@howard.edu. Anyone, yeah anyone, can join.
Requirements for VIP Participants
| Requirements | Resources |
| 1. Approval
from Team Advisor (use Team Contract From -- See the right column) 2. Weekly Team Meeting Participation & Meeting Records 3. Participation in Semester-End Team Presentation (last week of the semester) 4. Submission of Survey (last week of each semester) 5. Submission of 1-minute video (or audio) clip of Elevator Pitch (Last week of the semester) |
* VIP
Team Contract Form
(pdf fillable), and a
Sample Contract * VIP Weekly Meeting Recording Form * VIP Survey (See below) at the end of the semester * Elevator Pitch & How to Prepare for it? * VIP Presentation Tips |
 (Survey is conducted at the end of each semester)
(Survey is conducted at the end of each semester)
HOWARD VIP Teams (2019-2020 Academic Year) Link to 2015-2016,2016-2017, 2017-2018, 2018-2019 Year
Link to Video Presentation (PechaKucha19)
| Project Team | Advisor/Contact | Project Description | Looking for Students in the following major (but not limited to) |
| Secure Smart Traffic (from Fall 2019) |
Advisor:
Dr.
Hassan Salmani (Computer Eng) Contact: Dr. Hassan Salmani (Computer Eng) hassan.salmani@howard.edu |
The goal of
the project is to realize secure smart traffic which is characterized:
Driving cars on the road; base stations on the side of the road which
gives road data to the cars; cars adjust position and speed among the
cars on the road; there are possibilities that the communication between
cars and car-station may be hacked; secure smart traffic shields the
communication. |
EE, CpE, CS, ME |
| Terminator (since Fall 2015) |
Advisor: Dr. Charles Kim
(Electrical Eng) ckim@Howard.edu |
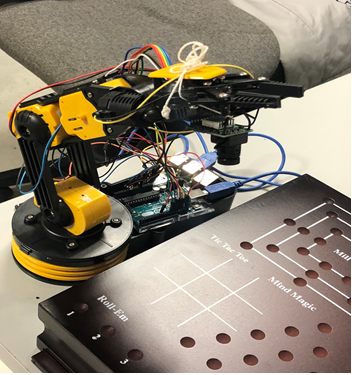
Team Terminator’s new project focuses on developing a Chess playing robot that relies on camera inputs to identify a chess board and a mechanical arm to move the chess pieces and on machine learning principles for ideal victory paths for the robot. This project aims to cover various engineering fields and expose participants to long term research in addition to applied and collaborative engineering environments. While a robot that can play a game of chess on its own is the end goal, for this academic year, we will a robot which plays the game of Tic Tac Toe. In subsequent years, we will gradually incorporate new features to achieve the end goal of building a robot which plays chess. The project will have mechanical, electrical, and programming aspects.
|
EE, CpE, CS, ME,
 www.VIPatProsthetics3.html |
| AutoMoe - "Resilient Autonomous/self-Driving Cars: A prototype" (sine Fall 2016) | Advisor:
Dr. Danda Rawat
(Computer Science) Contact: Dr. Danda Rawat (Computer Science) at danda.rawat@howard.edu |
This project
aims to develop light weight cybersecurity schemes, privacy aware
communications, adaptive speed control, automatic braking, rerouting,
information sharing using wireless access technologies and display
vehicle's status information.
More and
further more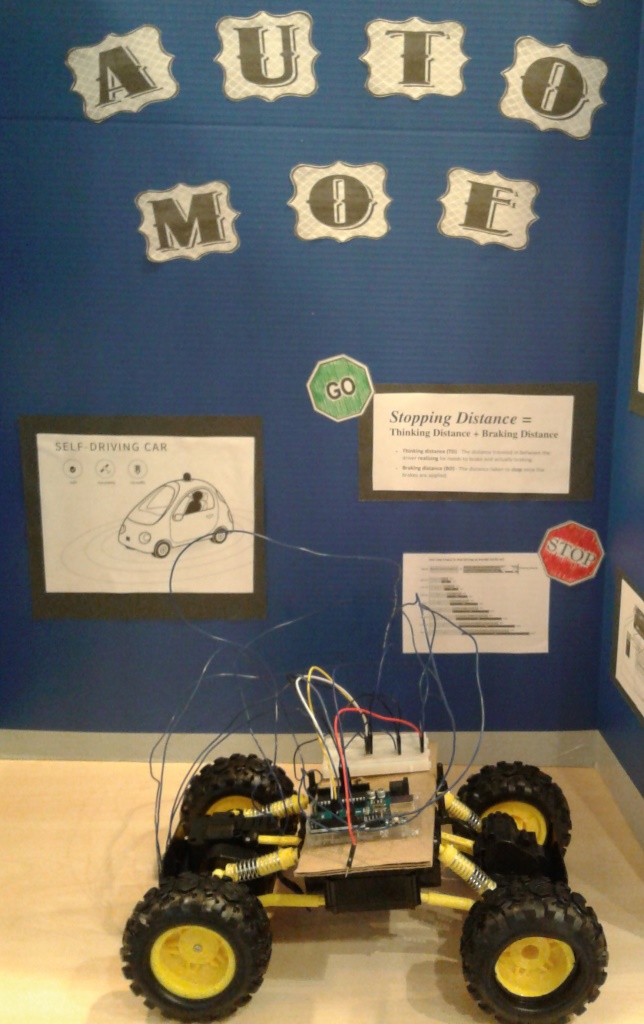 |
EE, CpE, CS, ME |
| Social Sphere Machine (from Fall 2019) |
Advisor: Dr. Charles Kim (ckim@howard.edu) (Electrical Engineering) |
The goal of this project is to develop a data analytic and machine learning (reasoning) algorithm to analyze social media data to predict social events such as opioid crisis, hate crime, and social unrest. Related subjects such as fake information/news detection and radicalization warning are of interests of the project. Information entropy based classification, clustering, and decision-making is applied to develop the algorithm. Python-based coding and implementation is planned along with data analysis and visualization with R.
|
EE, CpE, CS, Sociology, MATH |
| SlamERS(from Fall 2017) |
Advisor:
Dr.
Michaela E. Amoo (Computer Eng) Contact: Dr. Michaela Amoo at mamoo@howard.edu |
A stable and robust wheeled autonomous platform is needed to
facilitate mobile scientific experiments and remote sensing in adverse
environments.
It is impractical to use Commercial
off the Shelf (COTs) chassis’ because one-fit-for-all-purpose designs
rarely match the intended use/function.
The platform must be stable and robust enough to carry a custom
built mobile scientific experimentation station in adverse/unknown
environments. There is a strong desire to improve agility, while
reducing cost and maintaining quality. Rapid prototyping facilitates
speedy fabrication of designs. Accurate 3D models are essential for
3D printing, but are time consuming and tedious to derive manually. We
need the ability to rapidly prototype and produce high quality, robust,
custom parts, for an autonomous platform.
SlamERS: Team #1:
Embedded
System Design
2019 Goals: Students will integrate all system
design components from previous year into a COTs based autonomous
wheeled platform using sensor arrays (IR Rangers, Lidars etc),
integrating circuits, sensor arrays, and motor controls, from previous
year into a complete PIC-based system. Final product be stable and
robust under adverse conditions.
SlamERS: Team #2: Robust
Chassis for an Autonomous Platform
2019 Goals: Students will design, prototype,
test, and produce a 4WD chassis, which is stable and robust enough to
carry the required load (mobile science/experiment system) in off-road
terrains (sand, gravel, dirt, under-brush and heavy foliage) and adverse
weather conditions (wind, rain, ice, heat). A small, commercial off the
shelf (COTs), prototype will be supplied for a scale-up reference. Use
engineering analysis and tools such as modeling and simulation to
validate design selection and experimental results. Design, prototype,
test, and build a functional 4WD chassis.
SlamERS: Team #3: 3D
Design 2019 Goals: Students will determine whether Intel depth cameras are capable of producing highly accurate 3D models of small complex objects (gears etc) by comparing the accuracy of the resulting models with those obtained from the Capture Laser Scanner (3D systems, Inc), designing an interface to convert the 3D point clouds to 3D mesh/models for use with CAD tools and 3D printers, and using engineering analysis and tools to validate and compare the accuracy of models obtained from both systems. More on the project. Further More on the project (note: zip file) |
CpE, CS, ME, MATH |
| Deliveroid- A Delivery Robot (from Fall 2017) |
Advisor:
Dr. Charles Kim
(ckim@howard.edu Electrical Eng) Graduate Assistant: Derrick Anang Email: derrickann23@gmail.com |
The long term goal of the project is to build a delivery robot which
performs errands between any two locations even in different floors of a building. A short term objective is to
build a 1st-gen robot which delivers to a location in the same floor.
Microcomputer coding, sensing, RFID or Wi-Fi and remote access, and
proximity detection would be integrated for the project.
More
and further
more
 |
EE, CpE, CS, ME |
| Sandia Senior Design Bonanza - Flight Accelerometer Switch (from Fall 2019) |
Advisors: Dr. Michaela Amoo (mamoo@howard.edu) Computer Engineering)
& Dr. Grant
Warner (Mechanical Engineering) |
Objective: Design,
prototype, test, and produce a Flight Accelerometer Switch (FAS) -
single axis switch of mechanical in nature not a COTS part, which
detects acceleration, either by time integration or maximum acceleration
and then closes a switch (creating a signal path of optical, electrical,
electromagnetic, acoustic, etc.) once a threshold is reached.
The closing of the FAS triggers the recording of elevation and time.
The FAS should remain closed and continue recording throughout the
recording tine.
|
ME, EE, CpE, CS, CHEM |
| EM Playground (from Fall 2019) |
Advisor: Dr. Su Yan
(Electrical Engineering)
su.yan@howard.edu; www.sudoem.com Graduate Assistant: Minyechil Mekonnen (minyechil.mekonnen @bison.howard.edu) |
Project Description: The goal of this project is to design and implement an Electromagnetic (EM) Virtual Playground which visualizes the generation, propagation, and interaction of EM waves with environments. With Python implementations, the Playground will have a foreground --- the graphic user interface (GUI), in which users can set up a virtual experiment and visualize the physical results, and a background --- the engine, where the scientific computing takes place to carry out the experiment numerically. Upon completion of this project, the delivered EM Playground will enable students to conduct virtual experiments with different experimental setups, such as different sources, materials, and geometries, and perform simulations to monitor and visualize the process of EM phenomena such as antenna radiation, wave scattering and diffraction. More advanced features, including a multiphysics component, an online/mobile demo tool, and high-performance computing features, will be integrated into the Playground in the next few years. | EE, CpE, CS, MATH |